 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGEnSHIN: Graphical Enhanced Spatio-temporal Hierarchical Inference Network for Traffic Flow Prediction
Jan 08, 2026With the acceleration of urbanization, intelligent transportation systems have an increasing demand for accurate traffic flow prediction. This paper proposes a novel Graph Enhanced Spatio-temporal Hierarchical Inference Network (GEnSHIN) to handle the complex spatio-temporal dependencies in traffic flow prediction. The model integrates three innovative designs: 1) An attention-enhanced Graph Convolutional Recurrent Unit (GCRU), which strengthens the modeling capability for long-term temporal dependencies by introducing Transformer modules; 2) An asymmetric dual-embedding graph generation mechanism, which leverages the real road network and data-driven latent asymmetric topology to generate graph structures that better fit the characteristics of actual traffic flow; 3) A dynamic memory bank module, which utilizes learnable traffic pattern prototypes to provide personalized traffic pattern representations for each sensor node, and introduces a lightweight graph updater during the decoding phase to adapt to dynamic changes in road network states. Extensive experiments on the public dataset METR-LA show that GEnSHIN achieves or surpasses the performance of comparative models across multiple metrics such as Mean Absolute Error (MAE), Root Mean Square Error (RMSE), and Mean Absolute Percentage Error (MAPE). Notably, the model demonstrates excellent prediction stability during peak morning and evening traffic hours. Ablation experiments further validate the effectiveness of each core module and its contribution to the final performance.
NeuroMapper: In-browser Visualizer for Neural Network Training
Oct 22, 2022
We present our ongoing work NeuroMapper, an in-browser visualization tool that helps machine learning (ML) developers interpret the evolution of a model during training, providing a new way to monitor the training process and visually discover reasons for suboptimal training. While most existing deep neural networks (DNNs) interpretation tools are designed for already-trained model, NeuroMapper scalably visualizes the evolution of the embeddings of a model's blocks across training epochs, enabling real-time visualization of 40,000 embedded points. To promote the embedding visualizations' spatial coherence across epochs, NeuroMapper adapts AlignedUMAP, a recent nonlinear dimensionality reduction technique to align the embeddings. With NeuroMapper, users can explore the training dynamics of a Resnet-50 model, and adjust the embedding visualizations' parameters in real time. NeuroMapper is open-sourced at https://github.com/poloclub/NeuroMapper and runs in all modern web browsers. A demo of the tool in action is available at: https://poloclub.github.io/NeuroMapper/.
SkeletonVis: Interactive Visualization for Understanding Adversarial Attacks on Human Action Recognition Models
Jan 26, 2021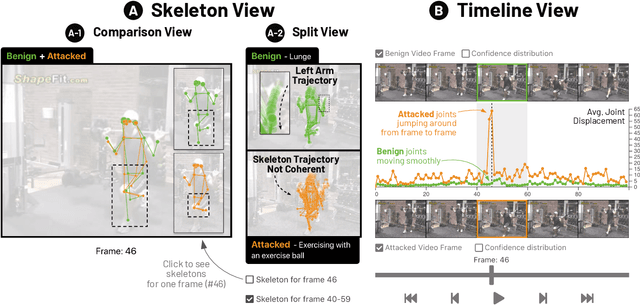
Skeleton-based human action recognition technologies are increasingly used in video based applications, such as home robotics, healthcare on aging population, and surveillance. However, such models are vulnerable to adversarial attacks, raising serious concerns for their use in safety-critical applications. To develop an effective defense against attacks, it is essential to understand how such attacks mislead the pose detection models into making incorrect predictions. We present SkeletonVis, the first interactive system that visualizes how the attacks work on the models to enhance human understanding of attacks.